د سکارا روبوټیک وسلې - Z-Arm-4160B همکار روبوټیک لاس





اصلي کټګوري
صنعتي روبوټ بازو / همکار روبوټ بازو / بریښنایی ګریپر / هوښیار عمل کوونکی / اتومات حلونه
غوښتنلیک
د SCIC Z-Arm کوبوټونه د سپک وزن لرونکي 4-محور همکار روبوټونه دي چې دننه د ډرایو موټور سره جوړ شوي، او نور د نورو دودیزو سکارا په څیر کمونکو ته اړتیا نلري، لګښت یې 40٪ کموي. د SCIC Z-Arm کوبوټونه کولی شي دندې ترسره کړي چې پکې شامل دي مګر محدود نه دي د 3D چاپ، د موادو اداره کول، ویلډینګ، او لیزر نقاشي. دا ستاسو د کار او تولید موثریت او انعطاف خورا ښه کولو توان لري.
ځانګړتیاوې

لوړ دقت
د تکرار وړتیا
±0.02 ملي متره
دودیز شوی Z-محور
۰.۱-۰.۸ متره
لوی بار
۴ کیلوګرامه ولاړ شئ
اعظمي ۵ کیلوګرامه
لوړ سرعت
اعظمي خطي سرعت 2m/s
(د سټینډ بار ۵ کیلوګرامه)
د لاسونو لویه موده، لوړ دقت لرونکی څلور محوري روبوټ بازو چې کارول یې اسانه دي
لوړ دقت
د تکرار وړتیا: ±0.02 ملي میتر
د لاسونو لویه برخه
J1-محور: 325 ملي متره،J2-محور: ۲۷۵ ملي متره
دودیز شوی Z-محور
پورته او ښکته سټروک د 0.1m-0.8m ترمنځ تنظیم کیدی شي
د ځای خوندي کول
ډرایو/کنټرولر جوړ شوی دی
ساده او کارول یې اسانه دي
هغه نوی راغلی کس چې د روبوټ بازو په اړه نه پوهیده، کارول یې هم اسانه دي، انٹرفیس یې خلاصیږي.
لوړ سرعت
د 4 کیلوګرامه بار لاندې یې سرعت 2000mm/s دی

اړوند توليدات



د مشخصاتو پیرامیټر
د SCIC Hitbot Z-Arm 4160B د SCIC ټیک لخوا ډیزاین شوی، دا یو سپک وزن لرونکی همکار روبوټ دی، د پروګرام کولو او کارولو لپاره اسانه دی، د SDK ملاتړ کوي. سربیره پردې، دا د ټکر کشف ملاتړ شوی، یعنې، دا به د انسان سره د لمس کولو پرمهال ودرول اتومات وي، کوم چې د انسان او ماشین هوښیار همکاري ده، امنیت لوړ دی.
| د Z-Arm 4160B همکار روبوټ بازو | پیرامیټونه |
| د ۱ محور بازو اوږدوالی | ۳۲۵ ملي متره |
| د ۱ محور د څرخېدو زاویه | ±۹۰ درجې |
| د دوه محوري بازو اوږدوالی | ۲۷۵ ملي متره |
| د دوه محورونو د گردش زاویه | ±۱۶۴° اختیاري: ۱۵-۳۴۵ درجې |
| د Z محور سټروک | ۴۱۰ لوړوالی دودیز کیدی شي |
| د R محور د گردش حد | ±۱۰۸۰ درجې |
| خطي سرعت | ۲۰۰۰ ملي متره/ثانیه (۴ کیلو ګرامه بار) |
| د تکرار وړتیا | ±0.02 ملي متره |
| معیاري بار | ۴ کیلوګرامه |
| اعظمي بار | ۵ کیلوګرامه |
| د آزادۍ کچه | 4 |
| د برېښنا رسونه | 220V/110V50-60HZ د 48VDC لوړ بریښنا 960W سره تطابق |
| اړیکه | ایترنیټ |
| د پراخېدو وړتیا | جوړ شوی مدغم حرکت کنټرولر د 24 I/O + د لاس لاندې پراخوالی چمتو کوي |
| د Z محور په لوړوالي کې تنظیم کیدی شي | ۰.۱ متره ~ ۰.۸ متره |
| د Z-axis کشولو تدریس | / |
| بریښنایی انٹرفیس خوندي دی | معیاري ترتیب: د ساکټ پینل څخه د ښکته بازو پوښ له لارې 24*23awg (غیر محافظتي) تارونه اختیاري: د ساکټ پینل او فلانج له لارې 2 φ4 ویکیوم ټیوبونه |
| مطابقت لرونکي HITBOT برقي ګریپرونه | د Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/ لپاره د محصول ځانګړتیاوېد Z-EFG-30/Z-EFG-50/Z-EFG-100 لپاره تفتیش وسپارئ، موږ به په 24 ساعتونو کې له تاسو سره اړیکه ونیسو. |
| د رڼا تنفس کول | / |
| د دوهم لاس د حرکت حد | معیاري: ±۱۶۴° اختیاري: ۱۵-۳۴۵ درجې |
| اختیاري لوازم | / |
| د چاپیریال څخه کار واخلئ | د محیطي تودوخې درجه: 0-45 درجو سانتي ګراد رطوبت: ۲۰-۸۰٪ RH (پرې یخ نشته) |
| د I/O پورټ ډیجیټل ان پټ (جلا شوی) | ۹+۳+ د لاس د لاس غځول (اختیاري) |
| د I/O پورټ ډیجیټل محصول (جلا شوی) | ۹+۳+ د لاس د لاس غځول (اختیاري) |
| د I/O پورټ انلاګ ان پټ (4-20mA) | / |
| د I/O پورټ انلاګ محصول (4-20mA) | / |
| د روبوټ د لاس لوړوالی | ۸۶۰ ملي متره |
| د روبوټ د لاس وزن | ۴۱۰ ملي متره سټروک خالص وزن ۳۶.۵ کیلو ګرامه |
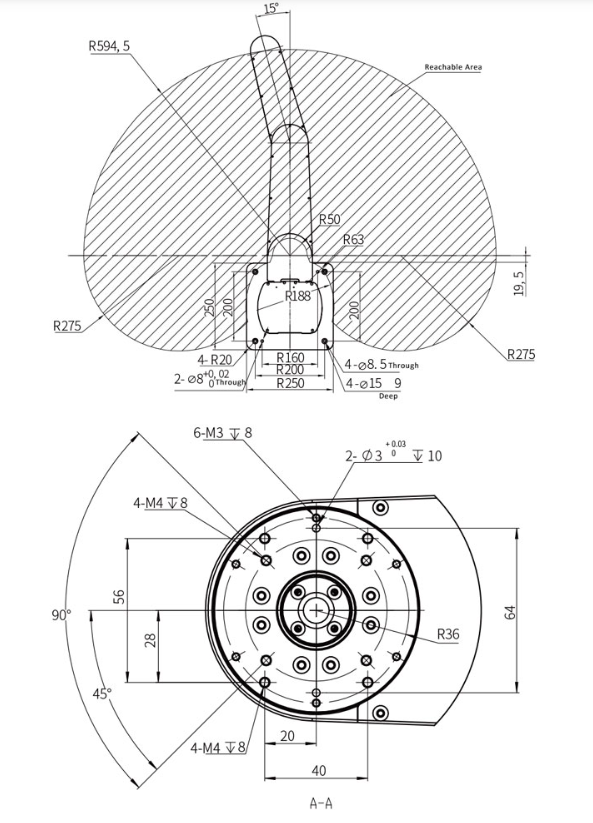
| د اساس اندازه | ۲۵۰ ملي متره * ۲۵۰ ملي متره * ۱۵ ملي متره |
| د اساس د فکس کولو سوري ترمنځ واټن | ۲۰۰ ملي متره*۲۰۰ ملي متره د څلورو M۸*۲۰ پیچونو سره |
| د ټکر کشف | √ |
| د کشولو تدریس | √ |
د سپک وزن د اسمبلۍ دندو لپاره غوره انتخاب
Z-Arm XX60B یو څلور محوره روبوټ بازو دی چې د لویو بازو اوږدوالی لري، کوچنۍ ساحه نیسي، د کار سټیشن یا د ماشین دننه د ایښودلو لپاره خورا مناسب دی، دا د سپک وزن د اسمبلۍ دندې لپاره یو مثالی انتخاب دی.


سپک وزن د لوی گردش زاویه سره

د محصول وزن شاوخوا 36.5 کیلوګرامه دی، اعظمي بار یې تر 5 کیلوګرامه پورې کیدی شي، د 1 محور د گردش فرښته ±90° ده، د 2 محور د گردش زاویه ±164° ده، د R محور د گردش حد تر ±1080° پورې کیدی شي.
د لاسونو لویه موده، پراخه غوښتنلیک

د Z-Arm XX60B اوږد بازو لري، د 1 محور اوږدوالی 325mm دی، د 2 محور اوږدوالی 275mm دی، د هغې خطي سرعت د 4kg بار لاندې تر 2000mm/s پورې کیدی شي.


د ځای پر ځای کولو لپاره انعطاف منونکی، د بدلولو لپاره ګړندی
د Z-Arm XX60B ځانګړتیاوې د سپک وزن، ځای خوندي کولو او د ځای پرځای کولو لپاره انعطاف منونکي دي، دا په ډیری غوښتنلیکونو کې د ځای پرځای کولو لپاره مناسب دی، او دا به د تولید پخوانی ترتیب بدل نه کړي، پشمول د پروسې ترتیب بدلولو لپاره ګړندي او د تولید کوچنۍ ډله بشپړه کول، او داسې نور.
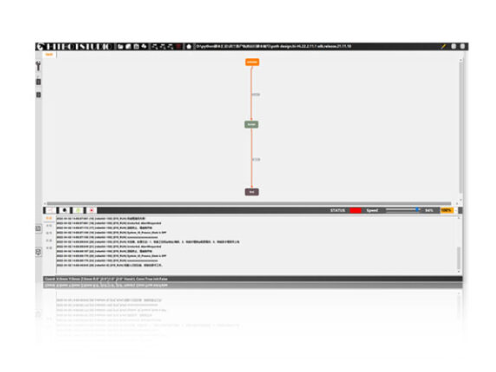
د پروګرام بشپړولو ته د زده کړې ډرایګ

دا سافټویر د ګرافیک ډیزاین پر بنسټ ولاړ دی، دا د نقطې، آوټ پټ سیګنال، بریښنایی ګریپر، ټری، ځنډیدلی، فرعي پروسس، ری سیٹ او نور اساسي فعال ماډل چمتو کړی دی، کاروونکي کولی شي د پروګرام کولو په ساحه کې د روبوټ بازو کنټرول لپاره ماډل کش کړي، انٹرفیس ساده دی، مګر فعالیت پیاوړی دی.
د حرکت حد M1 نسخه (بهر ته وګرځوئ)
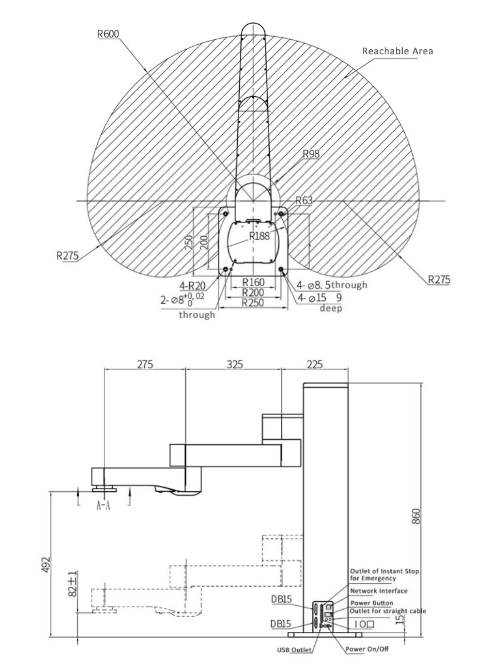
د DB15 نښلونکي سپارښتنه

وړاندیز شوی ماډل: د ABS شیل سره د سرو زرو پوښل شوی نارینه YL-SCD-15M د سرو زرو پوښل شوی ښځینه د ABS شیل سره YL-SCD-15F
د اندازې توضیحات: 55mm*43mm*16mm
(شکل ۵ ته مراجعه وکړئ)
د روبوټ بازو د بهرني استعمال چاپیریال ډیاګرام

زموږ کاروبار






